Antes de comenzar la breve exposición de la base de este proyecto (y usamos el adjetivo «breve» porque para comprender el src-HALS y conocerlo en profundidad, serían necesarios varios artículos como éste y de una extensión muchísimo mayor. Por ello, al pie de esta publicación les dirigimos a las fuentes oficiales que recogen la información completa y minuciosamente expuesta), quisiéramos despejar las siglas y acrónimos que lo denominan:
SRC: De las siglas en inglés «Set Redundancy Compression». En ciencias de la computación y teoría de la información, SRC son métodos de compresión de datos que explotan redundancias entre grupos de datos individuales de un conjunto, usualmente un conjunto de imágenes similares. Fuente: Wikipedia.
HALS: Acrónimo del inglés «Hand-Assisted Laparoscopic Surgery». En español se usa el acrónimo CLAM (Cirugía Laparoscópica Asistida con la Mano).
Una vez aclarado esto, expongamos unas nociones sobre el proyecto.
En el desarrollo de técnicas quirúrgicas mínimamente invasivas, que conllevan una recuperación más liviana y de menor duración para el paciente, los ingenieros robóticos y los cirujanos han aunado sus conocimientos para lograr que la cirugía laparoscópica o CL, sea cada vez mejor.
¿Qué dificultades se encuentra un cirujano al emplear una CL en cirugía? Entre otras cosas, la pérdida de sensación táctil y la visibilidad. Pues esto es, precisamente, lo que el proyecto src-HALS ha logrado implementar. Un sistema robotizado capaz de interactuar con el cirujano en diversas tareas, siendo capaz, incluso, de predecir circunstancias de riesgo elevado de posibles situaciones de emergencia, así como de ser partícipe de la supervisión de la intervención.
Como recogen las fuentes abajo citadas:
«La cirugía asistida con la mano (HALS) representa un nuevo escenario intermedio entre la cirugía laparoscópica clásica y la laparotomía (ver Figura 1). En ella, el cirujano introduce una mano en el abdomen para manipular los órganos, mientras que con la otra utiliza el instrumental convencional de la cirugía mínimamente invasiva. Este tipo de abordaje resulta útil en situaciones complejas, donde no se puede aplicar la cirugía laparoscópica clásica, y se ha demostrado que los tiempos de recuperación del paciente no resultan superiores a esta última técnica.
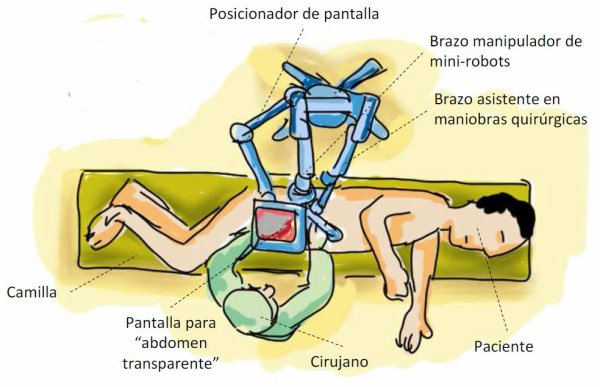
El proyecto aborda el desarrollo de un sistema robotizado orientado al uso del HALS y encuadrando al robot en el “co-worker” o «robot colaborativo», donde la máquina trabaja codo con codo con el cirujano, colaborando en las maniobras quirúrgicas y aprendiendo de la práctica. El objetivo es que la experiencia que adquiera el robot, mejore su asistencia y sea capaz de detectar situaciones de emergencia.
Este sistema robotizado comprende un manipulador capaz de operar una herramienta laparoscópica articulada y un endoscopio, y otro especializado en el movimiento de mini-robots dentro de la cavidad abdominal. Por otro lado, incluye una interfaz persona-máquina fundamentada en un guante quirúrgico inteligente y la capacidad de emular el concepto de “abdomen transparente” mediante la combinación de imagen real con realidad aumentada. Así, el sistema reconoce la fase actual de la intervención mediante el uso de los gestos de la mano del cirujano, el movimiento que realiza con el instrumento laparoscópico o a través de las lecturas de las señales fisiológicas combinadas con un modelo paciente-intervención. Con esta información, los brazos robóticos actuan de forma colaborativa con el cirujano y le asisten con la herramienta articulada, ubicando el endoscopio y los mini-robots en las localizaciones adecuadas para proporcionar una visión completa y adecuada del campo quirúrgico. Asimismo, el sistema de “abdomen transparente” permite la visión de la información de interés para el cirujano. Todo ello, se articula a través de una arquitectura cognitiva que incorpora un sistema de supervisión que vela por la integridad del sistema, el desarrollo de la intervención y la seguridad del paciente.
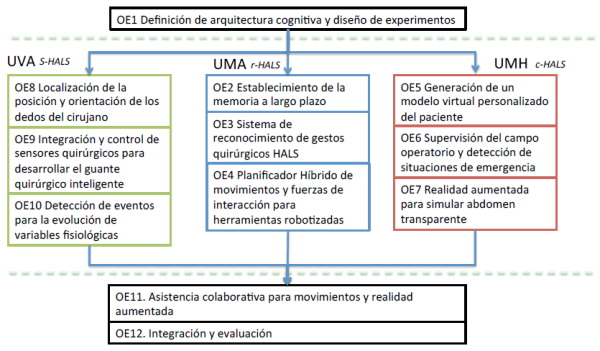
Así, en este proyecto se abordan técnicas y metodologías para la realización de movimientos colaborativos con instrumental laparoscópico que contemplen tanto el control de posición como de fuerzas para asistir en maniobras de anudado, clipado y cauterización, entre otras. En segundo lugar, se aborda el problema de la detección de gestos quirúrgicos HALS, que junto con la integración con información de las señales fisiológicas, ayuda a identificar la fase actual de la intervención. Además, como tercer componente se desarrollan métodos para emular el concepto de “abdomen transparente” mediante el uso de modelos virtuales personalizados del paciente, el uso de un sistema de visión consistente en un endoscopio y mini-robots cámaras y la información proveniente del guante quirúrgico inteligente. Finalmente, se trabaja en instalar una arquitectura cognitiva que albergue todos estos desarrollos y que verifique el concepto de robot “co-worker”. Para verificar todo el trabajo realizado se prevé la realización de una serie de experimentos in-vitro».

Proyecto desarrollado conjuntamente por el Grupo de Investigación de Robótica Médica de la Universidad de Málaga (dirigido por D. Víctor Fernando Muñoz Martínez, Doctor en Informática y Catedrático del Área de Ingeniería de Sistemas y Automática de la UMA), el Instituto de las Tecnologías Avanzadas de la Producción perteneciente a la Universidad de Valladolid (UVA) y la Universidad Miguel Hernández (UMH) de Elche.
Más información:
http://www.roboticamedica.uma.es/
http://www.roboticamedica.uma.es/src-hals/